
진동학 한방에 끝내기 22강
Ch. 4 Multiple-Degree-of-Freedom Systems
작성자
Godjunpyo (관리자)
작성일
2023-02-15 20:05
조회
216
#진동학 #modal analysis #three degree of freedom #root
안녕하십니까 교수님! 진동학 한방에 끝내기 22강 수강 중 이해가 가지 않는 것이 있어 질문드립니다!
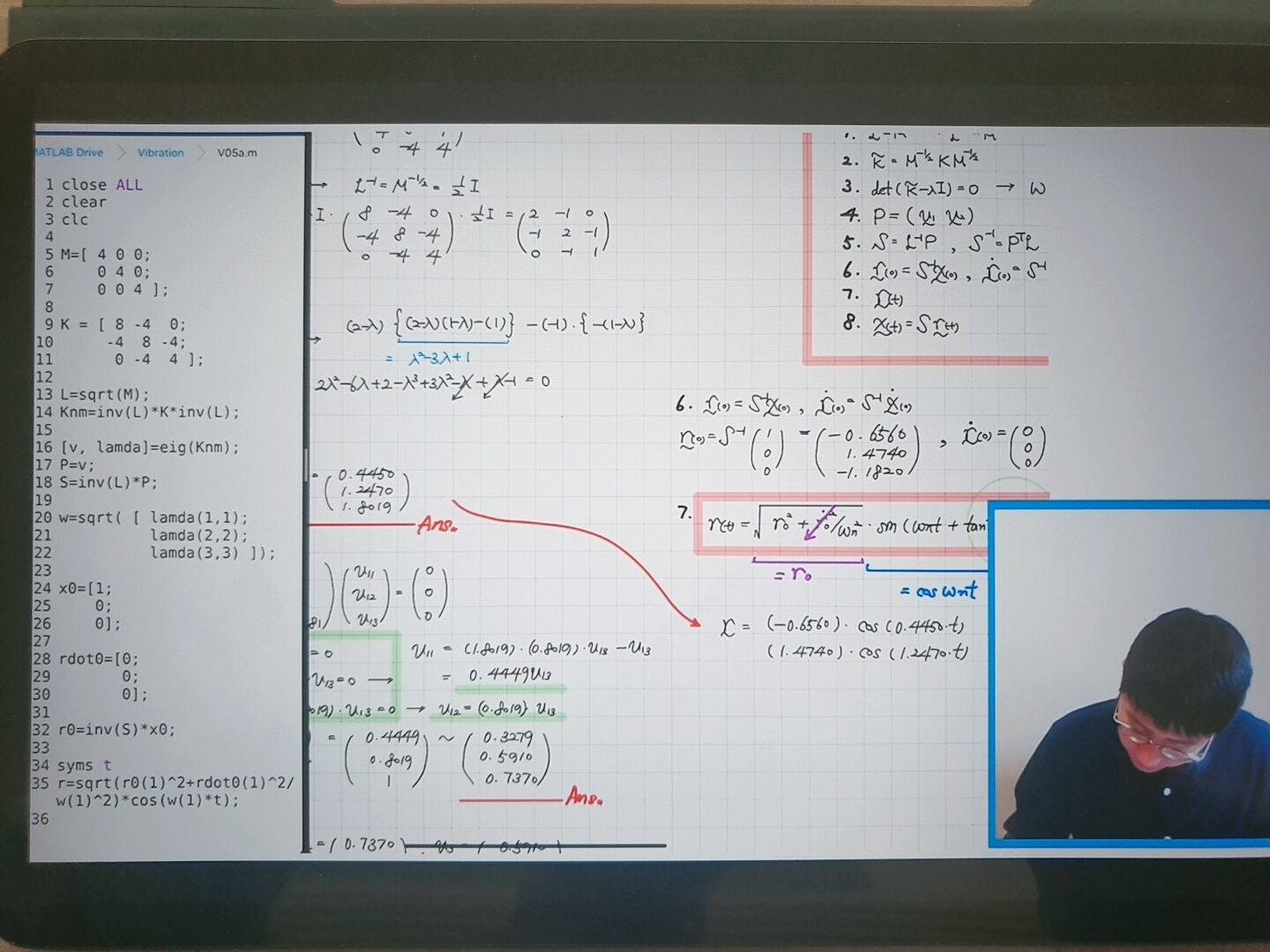
step7의 r(t)를 계산하는 과정에서 근호 안의 rdot0 = 0임을 이용하여 sqrt(r0^2 + 0) = r0라고 보라색 글씨로 써주셨고 이에 따라 r(t)의 첫 행을 (-0.6560)cos(0.4450t)라고 하셨습니다. 그런데 제가 알기론 sqrt((-2)^2) = 2인 것처럼 양수가 나오는것으로 알고 있는데 왜 음수로 나오는지 이해가 되지 않습니다.
바쁘신 와중에도 질문 봐주셔서 정말 감사합니다!
안녕하십니까 교수님! 진동학 한방에 끝내기 22강 수강 중 이해가 가지 않는 것이 있어 질문드립니다!
step7의 r(t)를 계산하는 과정에서 근호 안의 rdot0 = 0임을 이용하여 sqrt(r0^2 + 0) = r0라고 보라색 글씨로 써주셨고 이에 따라 r(t)의 첫 행을 (-0.6560)cos(0.4450t)라고 하셨습니다. 그런데 제가 알기론 sqrt((-2)^2) = 2인 것처럼 양수가 나오는것으로 알고 있는데 왜 음수로 나오는지 이해가 되지 않습니다.
바쁘신 와중에도 질문 봐주셔서 정말 감사합니다!
좋은 질문입니다.
Modal equations에서 나오는
modal solutions, r(t)의 부호에 관한 질문을 주셨습니다.
식을 하나 하나 보면 양수가 나와야 할 것 같지만
사실 modal solution은 vector이기 때문에
mode shape에 따라 음수가 나올 수도 있습니다.
제가 풀어드렸던 여러 예제를 한번 비교해보세요.
2-DOF 문제에서
스프링이 벽에도 매달려 총 2개의 스프링을 갖고 있는 경우와
총 1개의 스프링으로 매달린 경우는
서로 다른 mode shape을 가지고 있습니다.
1개의 스프링으로 매달린 경우가
2번째 mode solution 값이 음수가 나오는데,
이는 두 물체가
첫 번째 mode에서는 같은 방향으로 진동하고
두 번째 mode에서는 반대 방향으로 진동하기 때문입니다.
때문에 modal solution을 vector로 이해하시면
왜 음수가 나오는지 이해가 되실 겁니다.